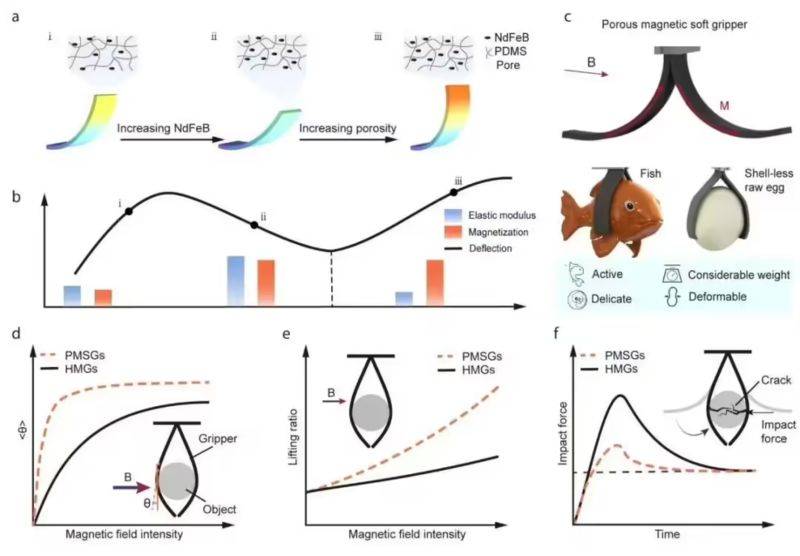
— 中科大成功研发多孔磁性软体抓手 可抓取蒲公英和去壳生蛋 —
更新时间:2024-10-30 09:55:03 编辑:丁丁小编
本文转载于:https://www.sohu.com/a/821674774_223764 如有侵犯,请联系dddazheyh@163.com删除
热门文章榜
-

- 三星研发QD-OLED面板量子点墨水再生技术 有望降低设备成本和售价
- 三星研发QD-OLED面板量子点墨水再生技术 有望降低设备成本和售价
- 立即抢购
-

- 0.02mm精度+百元天花板,玄派X68磁轴键盘键盘来袭
- 0.02mm精度+百元天花板,玄派X68磁轴键盘键盘来袭
- 立即抢购
-

- 就是“一句话的事儿!” 荣耀先于苹果发布AI Agent
- 就是“一句话的事儿!” 荣耀先于苹果发布AI Agent
- 立即抢购
-

- 华为Watch GT5将采用新传感器技术 有望快速准确监测多项健康数据
- 华为Watch GT5将采用新传感器技术 有望快速准确监测多项健康数据
- 立即抢购
-

- 中国电信9月底升级天通卫星网络 小米OV等通信功能将受影响
- 中国电信9月底升级天通卫星网络 小米OV等通信功能将受影响
- 立即抢购
-

- 铁威马D8 Hybrid硬盘柜:冷热数据存储的完美解决方案
- 铁威马D8 Hybrid硬盘柜:冷热数据存储的完美解决方案
- 立即抢购
热门优惠券
更多-
 立即领取
立即领取Coltorti Boutique EUBlack Week | Enjoy 45% Off FW24 Collection | Code: EXTRABF45 | Valid: WW!
Coltorti Boutique EUBlack Week | Enjoy 45% Off FW24 Collection | Code: EXTRABF45 | Valid: WW! -
 立即领取
立即领取Tata HarperBlack Friday Gwp | Free 5-Piece Gift with $300 Plus Purchase with Code BF2024
Tata HarperBlack Friday Gwp | Free 5-Piece Gift with $300 Plus Purchase with Code BF2024 -
立即领取
Tata HarperHoliday Sale! | Receive 20% Off Any Purchase of $175 Plus with Code HOLIDAY20
Tata HarperHoliday Sale! | Receive 20% Off Any Purchase of $175 Plus with Code HOLIDAY20 -
 立即领取
立即领取The Hut UK30% off selected lines, declining 1% every 2 hours!
The Hut UK30% off selected lines, declining 1% every 2 hours! -
 立即领取
立即领取AllSole UK30% off Declining 1% every 2%
AllSole UK30% off Declining 1% every 2%
最新分享
更多-
 立即阅读
立即阅读荣耀300 Pro三款配色公布 CEO确认将推出超大杯型号
2024-11-23 09:50:05 -
 立即阅读
立即阅读曝谷歌计划在安卓16将Gemini打造成AI智能体 代用户操作其他应用
2024-11-23 09:40:03 -
 立即阅读
立即阅读REDMI Watch5手表已开放预约 长达24天续航将于11月底发布
2024-11-23 09:35:03 -
 立即阅读
立即阅读OPPO Pad3将预装ColorOS15 搭载天玑8350处理器
2024-11-23 09:30:02 -
 立即阅读
立即阅读红米K80 Pro今日官宣搭载骁龙8至尊版处理器,堆料超级多!
2024-11-23 09:25:03 -
 立即阅读
立即阅读真我 V60 Pro入网,各项配置曝光,外观酷似真我 GT 大师探索版
2024-11-23 09:20:03 -
 立即阅读
立即阅读一加 13越用越懂你,越用越有“爱”!
2024-11-23 09:15:03 -
 立即阅读
立即阅读Brother“小墨方”系列彩喷一体机全新上市:小墨方·大不凡,开启彩喷新时代
2024-11-23 09:09:58 -
 立即阅读
立即阅读没想到工作的良药是“增效”|理光@你一起「追绿运动 步步开FUN」
2024-11-23 09:04:58 -
 立即阅读
立即阅读OPPO Reno13系列搭载自研抢网芯片X1 称弱信号中网络依然流畅
2024-11-22 17:15:01